Palabras claves
Determinante, origen determinante matrices, grupo de lie, ejemplo det=1, algoritmo, calculo determinante, javascript,
álgebra de lie, simulador,
ejemplo introductorio,
sistema de ecuaciones lineales,
función javascript,
grupo de lie,
rotación pasiva,
ejemplo de grupo,
aplicación, ecuaciones lineales,
Permutaciones,
Resumen
El propósito de este artículo es recordar los orígenes y las
diversas aristas operativas, algebraicas e históricas de la
determinante de una matriz en el mundo de la algebras abstractas.
En las presentaciones sobre los Grupos de Lie y Algebra de Lie, se menciona frecuentemente la determinante diferente de cero para garantizar la existencia de la matriz inversa, llegando a convertirse sólo en un dato dentro de la explicación.
Ciertamente se da por sentado y trivial el conocimiento de la determinante, dado que se enseña en el álgebra elemental, geometría analítica y particularmente en la resolución de los sistemas lineales de ecuaciones compatibles y otras ramas básicas de la matemática, sin entrar en aplicaciones teóricas.
What's in a name?, that wish we call a rose
By any other name would smell as sweet.
William Shakespeare (Romeo and Juliet)
El presente artículo corresponde a una breve nota que surge del estudio de las Matrices de Pauli, los grupos y Algebra de Lie que he estado desarrollando en una serie de publicaciones, particularmente los grupos lineales especiales ortogonales $SO(2),SO(3)$ y el grupo especial lineal general $Sl_2$ que es una variedad algebraica.114.
Cuando se ha estado estudiando y publicando desde hace varios años herramientas acerca de las leyes de estructuras algebraicas abstractas, a fin de equiparse conceptualmente con más matemáticas para el desarrollo de algoritmos en programación, entonces ¿Por qué abordar un cálculo del álgebra elemental como la Determinante de una Matriz?
La respuesta es porque es una herramienta de cálculo fundamental que podría estar insuficientemente explicada y porque la palabra determinante tiene poder de contenido en ciertas realidades.
Herramienta matemática que hoy, junto a los Grupos de Lie102, se ocupa en casi todas las ciencias de la matemática teórica y aplicada, computación cuántica, Física, Química, Biología, Economía, Robótica, ... Se podría decir que casi no existe una materia científica donde no sea utilizada. Porque donde hay matrices cuadradas, ahí está la determinante.
Materias, donde siempre aparece, el valor de la determinante como una propiedad necesaria o como una especificación, un requisito, una condición, una observación matricial asociada a este cálculo con respecto a cero o más menos 1, pero siempre como un dato a tener en cuenta.
Cuando colegas desde el ámbito de la filosofía y Ciencias Sociales no les parece, no les gusta el nombre "Determinante", tampoco el concepto determinístico de cálculo138 y cuestionan que en una rama de la matemática existan verdades absolutas, aunque sea dentro del marco de estructuras algebraicas u objetos abstractos definidos por la razón humana.
Es decir, plantean que el lenguaje es fundamental y prioritario, donde la matemática depende de las construcciones de la realidad. Argumentan que la matemática es un invento del ser humano, por lo tanto es una ficción y afirmando que todo es probabilístico.
Para no caer en una discusión filosófica bizantina, donde obviamente no estoy de acuerdo e intentar ir más allá de la razón ingenieril, afirmando que verdad matemática es perfecta, coherente y autónoma. El término "Determinante" es sólo una palabra dentro de un contexto matemático, no es necesario discutir esa controversia sinsentido.
El Nombre Determinante
El nombre determinante se utiliza porque este valor único "determina" o "define" propiedades importantes de la matriz. Si la matriz es invertible, determina si un sistema de ecuaciones lineales asociado tiene una solución única, y también se utiliza en la resolución de ecuaciones diferenciales y en la geometría para determinar la orientación y el volumen de los espacios vectoriales transformados por la matriz.
La determinante de una matriz es llamada así porque proporciona una determinación única de varias propiedades y comportamientos importantes de la matriz en el ámbito del álgebra lineal y otras ramas de las matemáticas, como el caso específico de los Grupos de Lie en $SO(n)$ 123 .
Dentro del contexto del Algebra de Matrices, el término proviene del latín "determinare", que significa "limitar" o "definir". En el ámbito matemático, es una medida numérica que proporciona información sobre las propiedades de la matriz en cuestión.
Cuando se trabaja con matrices, especialmente en álgebra lineal, es crucial comprender cómo se comportan estas estructuras algebraicas bajo ciertas operaciones como la multiplicación, la inversión, y la resolución de sistemas de ecuaciones lineales.
La determinante de una matriz cuadrada es un valor escalar único que puede ser calculado utilizando varios métodos. Independientemente del método utilizado, la determinante es esencialmente un número único que se asocia a una matriz cuadrada y que refleja cómo se comporta la matriz bajo diversas operaciones algebraicas145.
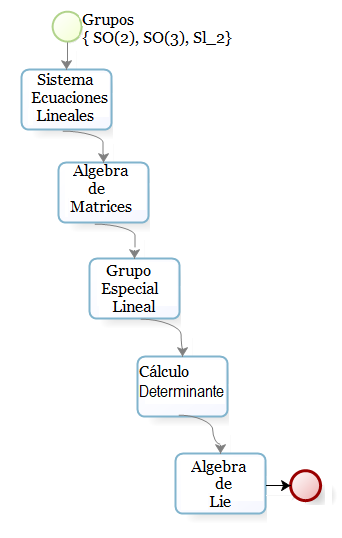
A continuación, presento una breve nota que intenta mostrar sencillamente cómo este indispensable cálculo asociado a una matriz cuadrada llamada determinante, evoluciona desde una notación para la resolución de sistemas de ecuaciones lineales, pasando por la Teoría de Grupos, hasta llegar a un Algebra de Lie. De hecho, ha ido e irá aún más lejos dentro del desarrollo del pensamiento matemático.
+ ¿Qué es la Determinante?
Determinante
x
¿Qué es la determinante?
La determinante de una matriz cuadrada $M$, es un escalar que resulta de las operaciones ordinarias entre los elementos que conforman dicha matriz. Es decir, es una notación que reduce un repetitivo patrón del denominador común que surge de la resolución de sistemas lineales de ecuaciones compatibles o determinados.132. En síntesis, a cada matriz cuadrada de orden $n$ le asocia un escalar, que denotamos como $det(M)$
La representación matemática de una determinante, conserva el arreglo numérico bidimensional de su matriz cuadrada. Puesto que tiene la misma disposición de elementos como estructura matemática con filas y columnas, pero donde se cambian los paréntesis de la matriz por barras verticales.
La determinante de una matriz cuadrada $M$ siempre es un número real. Cabe destacar que las noción y concepto apareció durante el Siglo XVII, pero sus propiedades se elaboraron más formalmente a mitad del siglo XIX, por parte del británico James Joseph Silverton, para posteriormente aplicarlas más profundamente por el matemático, físico, y astrónomo irlandés llamado William Rowan Hamilton, descubridor de los cuaterniones 143.
En otros términos, la determinante de una matriz es un invariante algebraico, cuyo concepto fue inicialmente incorporado para solucionar sistemas de ecuaciones lineales.130
Con el desarrollo y evolución de la matemática desde el siglo XVII, la determinante fue adquiriendo propiedades más elaboradas y siendo definida como estructura algebraica de forma multilineal alternada sobre un espacio vectorial.144
Este último enfoque generaliza el concepto de determinante de una matriz, haciéndolo aplicable en numerosos campos del álgebra lineal y abstracta.
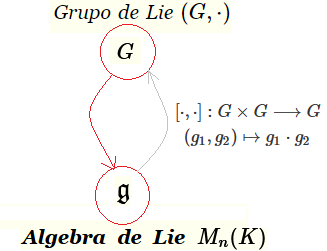
Grupo de Lie $G$ $\longrightarrow$ Algebra de Lie $\large{\mathfrak {g}}$141
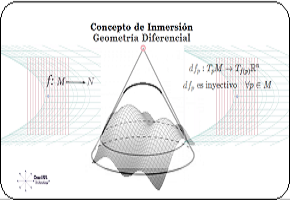
Otro enfoque de la definición del Algebra de Lie, es a partir de un Grupo de Lie $G$ 81, en tanto es una variedad diferenciable topológica o una Variedad Suave ("Manifold" o superficie como un plano, un círculo, una esfera, u otras superficies suaves en diferentes dimensiones) 105
Por tanto, un Grupo de Lie $(G,·)$ es:
i) Un grupo dotado de una operación binaria 80;
ii) Adicionalmente, $G$ es una variedad topológica suave diferenciable, con una operación binaria propia (Corchete de Lie) que mapea, como se describe a continuación:
$$[·,·]:G \times G \longrightarrow G\\
(g_1,g_2)\longrightarrow g_1·g_2
$$
Nótese que tanto el producto vectorial $G \times G$ es una variedad topológica suave y $G$ es una variedad suave también, por tanto, se tiene un mapeo sobre variedades suaves, donde se garantiza una función inversa $inv:G \times G \longrightarrow G$ con $g \mapsto g^{-1}$.
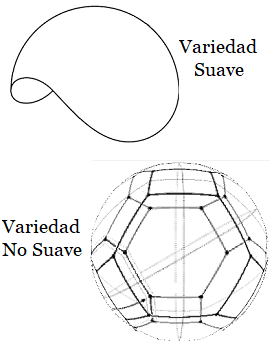
En términos simples, una variedad es suave cuando la superficie no tiene quiebres y es homeomorfa a un parche en $R^n$.
Variedad Suave (o lisa) vs Variedad No Suave (quebrada)
Por ejemplo, el grupo $G=(R^n,+)$ tiene una estructura suave, porque si se operan dos vectores de $R^n$ se obtiene la suma de esos dos vectores, el cual es un vector resultante suave. Por otro lado, si aplica la función de multiplicar por $-1$ es también una función suave. De modo que $(R^n,+)$ es un grupo de Lie, abeliano y también llamado grupo n-dimensional de traslación.
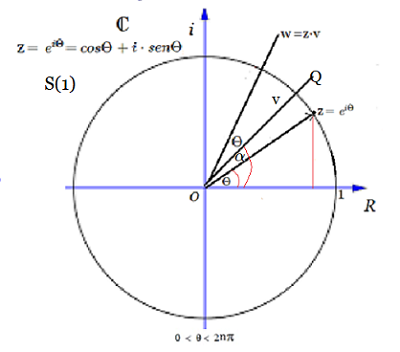
Otro ejemplo simple de estructura suave es $S(1)=\unicode{123} z \in \mathbb {C} \text{ / } |z|=1 \unicode{125}$ que es un círculo unitario, donde $z_{\theta}$ es un grupo de Lie de rotación pasiva.
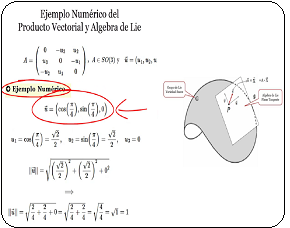
Sea $\mathbf {z_{\theta}}$ el operador lineal que utilizaremos en el ejemplo, el cual lo aplicamos a un vector cualquiera definido en el plano complejo $\mathbb {C}$ de la figura, de la forma $\mathbf {\vec v}=\overline {OQ}$ de ángulo $\alpha$. Es decir,
al multiplicarlo vectorialmente por $\mathbf{\vec {z}}$, será rotado en un ángulo $\theta$, obteniendo un vector resultante $\mathbf{\vec w} $ cuyo ángulo con respecto al eje de la $x$, será de $\theta + \alpha$:
$$ \mathbf {\vec w = \vec z· \vec v} \text{, donde } \mathbf{|w|=|zv|=|v|} \text{, dado que } \mathbf{|z|}=1$$
Sea $v= \mathbf{e}^{i\alpha}\Rightarrow z· w = {e}^{i(\theta + \alpha)}$
Grupo de Lie Conmutativo en $S(1)$ ~ $U(1)$
En general, en toda la serie de publicaciones acerca del tema 123, me he centrado en los Grupos de Lie que operan con matrices $n \times n$, tanto en los reales como en los complejos y cuya determinante es diferente de cero, donde el producto de estas matrices es también un ejemplo de variedad suave.
Es decir, matrices invertibles ($G=\unicode{123} M \in SO(n) \text{/} det(M)\neq 0 \land M^{T}M=M^{T}M=I\unicode{125}$), las cuales son globalmente clasificadas como $GL(n,\mathbb R)$ (General Linear Groups):
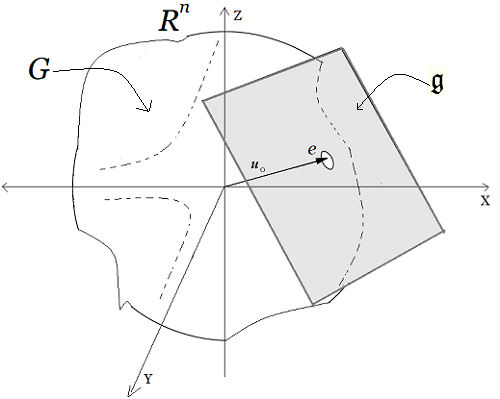
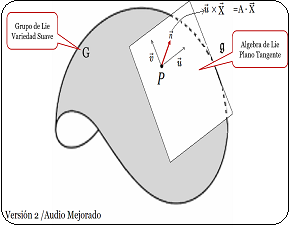
En la figura, se representa una superficie que tiene la estructura algebraica de un grupo.
Por tanto, si se toma un par de elementos $g_1,g_2$ de esa variedad $G$ y se aplica su correspondiente operación binaria, se obtendrá una resultante $g_3$, que también pertenece a la variedad $G$, i.e. $g_1 · g_2=g_3, \text{ donde } \forall g_1,g_2,g_3 \in G$.
Así mismo, encontramos el elemento Identidad e $\in G$ , sobre el cual se saca el plano tangente de la superficie.
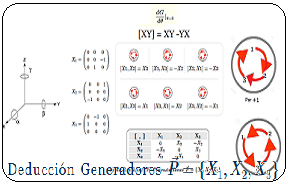
Este plano tangente es un Algebra de Lie $\large{\mathfrak {g}}$, cuyos generadores infinitesimales son el conjunto de matrices $\vec P=\unicode{123}X,Y,Z\unicode{125}$ y sus relaciones de conmutación. (Ver Generadores $SO(3)$)
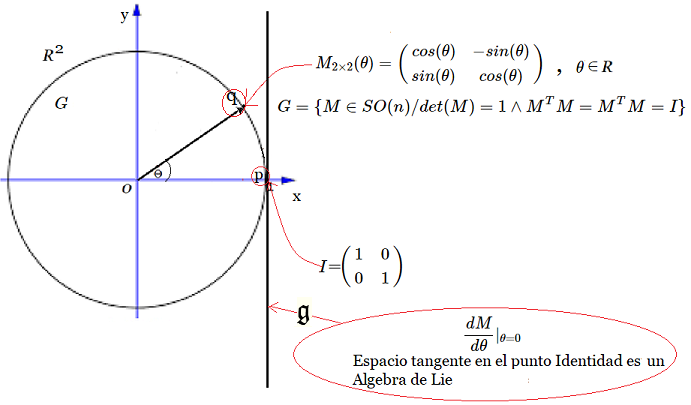
Luego, desde una perspectiva de la geometría euclídea este grupo especial $G$ se conecta con un Algebra de Lie mediante el espacio tangente al punto Identidad de $G$, utilizando la operación binaria, - previamente definida -, Corchetes de Lie, i.e. se satisfacen las propiedades de ser bilineal, antisimétrica y cumplir con identidad de Jacobi.
En otras palabras, $G$ es un grupo de Lie, su Algebra de Lie, es el espacio tangente en la identidad $I$.
Geométricamente la operación binaria corchete de Lie surge ahí de manera natural entre campos de vectores, i.e. $[X Y] = XY - Y X$ mide la variación de la variable $Y$ cuando se desplaza por las curvas integrales de $X$.
La figura muestra un círculo contenido en $R^2$, con un vector longitud $1$ y ángulo $\theta$, donde el punto $q$ tiene asociada la matriz $M_{2 \times 2}(\theta)$, - que es la operador de rotación que constituye un Grupo de Lie en $SO(2)$ -, y la recta tangente en el punto $p=(1,0)$, - que corresponde al elemento Identidad -. Luego, la recta tangente es un Algebra de Lie $\large{\mathfrak {g}}$.
+ Introducción
Introducción
x
El objetivo de estos apuntes es presentar un conjunto de puntos básicos que considero representativos para describir el cálculo y la enorme evolución de la determinante de una matriz.
Especialmente, ilustrar este transito, desde un simple cálculo de algebra elemental hacia el grupo lineal especial $Sl_n(\mathbb R)$140, - el cual se define por medio de la determinante igual a uno-, con su correspondiente Algebra de Lie $\mathfrak {g}$.
Pretende ser accesible y tratar de hacer énfasis en ideas y técnicas de la determinante de una matriz que juegan un papel fundamental en la teoría de grupos y álgebra de Lie, proporcionando notas adjuntas que complementan y ofrecen sugerencias para estudiar temas adicionales.
Estos apuntes provienen directamente desde los siguientes artículos, donde se usó el valor de la determinante de una matriz sin mayores detalles, sólo como una condición dada:
En estos apuntes, cuando se abordan los grupos de Lie, en general se refieren a un Grupo de Lie sobre el cuerpo de los números reales.(Ver Grupo de Lie Enfoque Geométrico)
El documento cuenta con una Ficha Técnica con todas las referencias identificatorias, un Prólogo que describe un comentario y motivaciones para la publicación y una breve nota acerca de la definición del Algebra de Lie desde el enfoque de Variedades Diferenciables.
+ Videos Asociados
x
Videos Publicados Asociados a los Grupos y Algebras de Lie
Condición Necesaria Grupos de Lie $ \mathbf{G}$ en $\mathbf{SO(n)}$
Hemos visto que una condición necesaria de las matrices $M$ que pertenecen a los Grupos de Lie $G$ en $SO(n)$, es que la determinante debe ser diferente de cero. Esto último implica que, existe una matriz inversa para $M$,
$$
det(M)\neq 0 \quad \Rightarrow \quad \exists M^{-1}
$$
De otra forma sería cuando $M$ es singular con $det(M)=0$ (o nulo), lo que significa que $M$ no tiene inversa y por tanto ya no sería un grupo.
En otras palabras, diríamos que $det(M)\neq 0$ es una condición necesaria para sea un Grupo de Lie $G \in SO(2)$, pero no suficiente.
Ciertamente, para que $M$ sea un Grupo de Lie de rotación pasiva, no basta sólo con que se cumpla esa condición $det(M)\neq 0$, sino que a su vez, su matriz inversa $M^{-1}$, debe ser igual a la matriz transpuesta de $M$. (segunda condición $M^{T}=M^{-1}$)
Nótese que
$$G=\unicode{123}M\in SO(n) \text{ / } det(M)=1 \land (M^{T}=M^{-1}\Rightarrow M M^{T} = M^{T} M=I) \unicode{125}$$
Es decir, $G$ es el conjunto de todas las matrices $M$ Especiales Ortogonales de Orden $n$, lo que significa que son como un grupo de transformaciones, donde sus determinantes son iguales a uno y su inversa es igual a su transpuesta.
Grupo $\mathbf {Sl_2 \in GL(\mathbb R^2,\text{·})}$
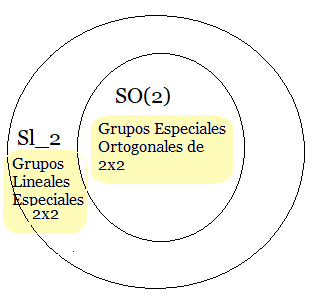
En particular, el siguiente grupo $Sl_2 \in GL(\mathbb R^n,\text{·})$ llamado "Special Linear Group"140, i.e. definido sobre $\mathbb R^2$, como grupo de matrices $2 \times 2$ con determinante igual a $1$, bajo las operaciones de multiplicación de matrices, donde se consideran todas las matrices cuya determinante es igual a uno. Es decir, $Sl_2$ es un grupo especial, pero no es siempre ortogonal. Dicho de otra manera, $SO(2)\subset Sl_2$, dado que toda matriz $M\in SO(2)$ por definición tiene determinante $det(M)=1$ y es lineal, por tanto está contenida en $Sl_2$.
Figura #1: $\mathit {SO(2)\subset Sl_2}$
Se recuerda que la ortogonalidad de la matriz implica que su aplicación lineal conserva la norma euclídea en $R^n$.
Efectivamente,
una matriz $M$ ortogonal significa que la $det(M)\neq 0$, dado que
$I=MM^{T}=M^{2} \Rightarrow det(MM^{T})=det(M)^2\Rightarrow det(M)=\pm 1$, i.e. cuando $M$ es ortogonal, implica que la $det(M)$ puede ser también igual a $-1$. Por lo tanto, las matrices cuya $det(M)=-1$ no pertenece a $Sl_2$.
Particular Ejemplo $Sl_2(\mathbb R,·)$
Se demostrará que $Sl_2$ definido sobre el cuerpo $\mathbb R$, es un grupo de matrices con determinante $2 \times 2$ bajo la multiplicación de matrices y entradas sobre $R$.
$$
Sl_2=GL(\mathbb R)=\Bigg\{M= \begin{pmatrix}
a & b\\
c & d\\
\end{pmatrix}\Bigg/ ad-bc=1 \Bigg\}
$$
P.D. $\mathbf {Sl_2}$ es un Grupo80
iv) Existe una matriz inversa, tal que $\forall M \in Sl_2, M·M^{-1} = M^{-1}·M =I$
$\begin{pmatrix}
a & b\\
c & d\\
\end{pmatrix}\begin{pmatrix}
x & y\\
z & w\\
\end{pmatrix}=
\begin{pmatrix}
1 & 0\\
0 & 1\\
\end{pmatrix}
$
$\Rightarrow$
Aplicando el cálculo de la inversa mediante el método de la matriz adjunta139 de $2\times 2$
$M^{-1}= \frac{1}{det(M)}· \text{adj}(M)$,
se tiene que la $det(M)=1$ y la adjunta es
$\begin{pmatrix}
d & -b\\-c & a\\\end{pmatrix}$,
cuya determinate $det(adj(M^{-1}))=da-bc=1$, i.e.
$M^{-1}=\begin{pmatrix}
d & -b\\-c & a\\\end{pmatrix}$, donde $M^{-1}=\begin{vmatrix}
d & -b\\-c & a\\\end{vmatrix}=1$
Por consiguiente, $\exists M^{-1}$ inversa, tal que $\forall M \in Sl_2, M·M^{-1}= M^{-1}·M =I$
__________________________
Por tanto, $Sl_2$ satisface las propiedades requeridas para constituir un grupo (Especial y Lineal).
QED //
__________________________
Observación: $\large{\exists}\ M\in Sl_2$, donde $M\notin SO(2)$
Nótese que el conjunto de transformaciones $Sl_2$ es un grupo lineal especial, pero no es un Grupo de Lie en $SO(2)$ (i.e. todas sus matrices no pertenecen al conjunto 'Special Ortogonal of Order 2' porque no todas son ortogonales).
Por ejemplo,
Sea $A=\begin{pmatrix}
1 & -3\\
0 & 1\\
\end{pmatrix}\in Sl_2$, que tiene por determinante $det(A)=1\neq 0$, su transpuesta es:
Es decir, $A\in Sl_2$ no es un grupo de Lie en $SO(2)$, dado que $A^{T}\neq A^{-1}$, o dicho de otra manera $AA^{T}=10\neq I$. i.e. no es ortogonal.
Ahora, si consideramos por ejemplo el conjunto de matrices de la forma:
$M=\begin{pmatrix}
cos(\theta) & -sin(\theta)\\sin(\theta) & cos(\theta)\\\end{pmatrix}
$, donde $\theta\in \mathbb R \quad \Rightarrow$,
$M$ si es un Grupo de Lie en $SO(2)$, dado que $det(A)=1 \land A^{T}=A^{-1}$
Dicho lo anterior, abordemos el origen de esta condición necesaria $det(M)\neq 0$, que caracteriza los grupos de matrices $n×n$, que operan en $GL(n,R)$ (General Linear Groups), bajo el cuerpo de los números reales y complejos. Condición que nos asegura que estas matrices son invertibles.
La visión y sentido original de la $det(M_{2 \times 2}) \neq 0$ era establecer la unicidad de la solución de un sistema de ecuaciones lineales. Después de un siglo, fue extendida para $det(M_{n \times n})$ e ir adquiriendo en el tiempo un significado moderno, algorítmico y abstracto.
Determinantes de Segundo y Tercer Orden
· Ejemplo 1, $\mathbf {M_{2 \times 2}}$
Por ejemplo, sea dado un sistema de ecuaciones lineales con dos incógnitas y con coeficientes $a_{ij},b_{i} \in R$
$$ \begin{matrix}
a_{11} x_1 + a_{12} x_2 = b_1\\
a_{21} x_1 + a_{22} x_2 = b_2\\
\end{matrix} \qquad\quad[1]$$
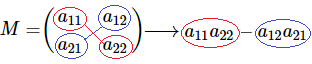
Cuyos coeficientes forman la matriz de segundo orden $M$:
Supongamos que el término $(a_{11}a_{22} - a_{12}a_{21})\neq 0$, (sino fuese así el sistema de ecuaciones lineales asociado a dicha matriz $M_{2 \times 2}$ rotulada en $[1]$ no tendría solución o tendría infinitas soluciones coincidentes).
Los valores obtenidos de $[3]$ son la solución del sistema $[1]$ (dada la unicidad de la solución).
El común denominador del valor de las incógnitas está simplemente expresado por los elementos de la matriz $[2]$. Es decir, es precisamente igual al producto de los elementos de la diagonal principal de $M$ menos el producto de los elementos de la segunda diagonal.
Para designar la determinante de la matriz $M$ se cambia los paréntesis por barras verticales:
$$ det(M)= \begin{vmatrix} a_{11} & a_{12} \\a_{21} & a_{22} \\ \end{vmatrix} \qquad\quad [4]$$
Luego, la determinante es un número completamente determinado por la matriz cuadrada. En este caso de $2 \times 2$, i.e. de segundo orden:
Aplicando la solución al sistema de ecuaciones por cualquier de los métodos de igualación de coeficientes del álgebra, se obtiene que el denominador de las tres incógnitas, i.e. lo que llamamos el determinante de la matriz $MM_{3 \times 3}$, es:
Aquí aplicamos el método de cálculo de Laplace136, donde se van tapando la fila y columna correspondiente al coeficiente de la fila superior multiplicado por la determinante de la matriz $2 \times 2$ que queda visible.131
Donde todos los coeficientes e incógnitas son reales, i.e. $a_{ij}, b_{i}, x_{i} \in \mathbb R$
Ahora, resolviendo la ecuación $[8]$ matricialmente, veremos que es una condición casi sine qua non recurrir a la determinante de $M$, i.e. el sistema debe ser compatible determinado:
En la ecuación matricial se tiene los vectores las columnas $X$, $B$ (Si $B=0$, el sistema se dirá que es homogéneo) y los coeficiente $M$, lo cuales se multiplican aplicando la matriz inversa $M^{-1}$.
Entonces, la ecuación matricial es:
$M X = B$, dado que $det(M)\neq 0 \Rightarrow \exists M^{-1}$
$\Rightarrow$
$ M X =B$ (Multiplicamos $M^{-1}$ por la izquierda en ambos miembros)
$\Rightarrow$
$\underbrace{M^{-1} M}_{I} \text{ } X = M^{-1}B$
$\Rightarrow$
$I X = M^{-1} B$
$\Rightarrow$
$X= M^{-1} B$
Por tanto, se resuelve la ecuación $[8]$ calculando el producto de la matriz inversa $M^{-1}$
por el vector columna $B$.
Generalización $\mathbf {det(M_{n \times n}})$
En términos generales:
$$det(M_{n \times n})=\sum_{i=1}^n a_{ij}(-1)^{i+j} det(M_{ij})\qquad\quad[9]$$
Donde $M_{ij}$ se obtiene al eliminar la fila $i$ y la columna $j$ de la matriz M.
Calcular manualmente determinantes de n-ésimo orden aplicando el mismo modo que se introdujo para los determinantes de segundo y tercer orden, es prácticamente irrealizable
Puesto que en la medida que aumenta el orden de la matriz, los cálculos se hacen más complicados y
con $n$ de gran magnitud arbitrario se debe recurrir a la automatización.
En los tiempos actuales se procede con herramientas computacionales, cuyos algoritmos contienen las operaciones del Algebra Lineal y en particular el Algebra de Matrices. Desde luego, el Excel, MatLab, Matrix Reshish y otras aplicaciones disponibles.
Determinante Desde el Siglo XVII
La arquitectura del algoritmo para el cálculo de una determinante que presento más adelante en esta nota no es nuevo, dado que sus bases ya la trabajaron múltiples matemáticos como el italiano Girolamo Cardano (1545), el japonés Kowa Seki (1683) y en la misma época el alemán Gottfried Leibniz en el siglo XVII. En los siglos posteriores, matemáticos como MacLaurin (1748), Cramer (1750), Bézout, Vandermonde, Laplace (1772), Gauss, Cauchy, Arthur Cayley 137, James Joseph Sylvester, etc.. con el cual determinaron la inversa de una matriz y las soluciones de un sistema de ecuaciones lineales.
Dicho lo anterior, continuemos analizando las resultantes de las determinantes de segundo y tercer orden desarrollados en los Ejemplo $1$ y Ejemplo $2$ para procurar establecer una ley general, de acuerdo a la cual se expresan estas determinantes mediante los elementos de las matrices correspondientes y tomaremos esta ley por definición para el determinante de orden $n \in \mathbb N$.
Algoritmo de Cálculo $\mathbf {det(M_{n \times n})}$
Se presentará a continuación este procedimiento de cálculo basado en el Teorema de Laplace, el cual permite simplificar el cálculo de determinantes en matrices de dimensiones mayores descomponiendo en la suma de determinantes menores.
Usando este concepto de Laplace, se construyó un simulador en línea y su correspondiente código en javascript.
La aplicación del simulador del cálculo de la determinante se ha restringido a seleccionar matrices hasta de orden $10$ por razones de presentación en pantalla, no así el algoritmo codificado en javascript, el cual admite matrices de magnitud $n>100$ y valores decimales.
En la aplicación-simulador las matrices que se muestran, se llenan con valores enteros aleatorios del intervalo $-100 \lt a_{ij} \lt 100$, en función del orden seleccionado.
Estos valores generados aleatoriamente de la determinante son editables, i.e. el usuario puede escribir otros valores enteros poniento el cursor (focus) sobre los campos o celdas que ocupa cada número. La resultante de la determinante aparece en un marco con fondo amarillo una vez presionando el botón "Calcular Determinante".
Nótese que al presionar el ícono , se llena nuevamente la matriz con valores aleatorios del orden seleccionado.
Calculador de Determinante
Orden de la Matriz
Los códigos fuentes del algoritmo señalan que el proceso se realiza en forma recursiva, reduciendo el cálculo a las determinantes de
$2 \times 2 $, tal como se explicó en el Ejemplo $2$.
Código Fuente - Cálculo de una Determinante- Javascript
<script>
function crea_Mat_nxn(nOrden)
{
var Mat_nxn = new Array(nOrden);
for (var i = 0; i < nOrden ; i++){
Mat_nxn[i]=new Array(nOrden);
}
return Mat_nxn;
}
function
determinante(Mat_nxn)
{
if(Mat_nxn.length==2){
var det=(Mat_nxn[0][0]*Mat_nxn[1][1])-(Mat_nxn[1][0]*Mat_nxn[0][1]);
return det;
}
var nSuma = 0;
for(var i = 0; i<Mat_nxn.length; i++){
var nm = crea_Mat_nxn(Mat_nxn.length-1);
for(var j=0; j<Mat_nxn.length; j++){
if(j!=i){
for(var k=1; k<Mat_nxn.length; k++){
var sIndice=-1;
if(j<i)
sIndice=j;
else if(j>i)
sIndice=j-1;
nm[sIndice][k-1] = Mat_nxn[j][k];
}
}
}
if(i%2==0){
nSuma += Mat_nxn[i][0] * determinante(nm);
}
else{
nSuma -= Mat_nxn[i][0] * determinante(nm);
} ;
}
return nSuma;
}
</script>
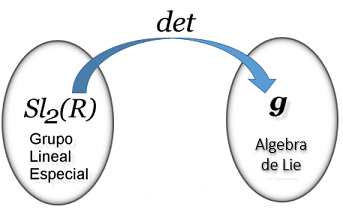
Grupo $\mathbf {Sl_2 \longrightarrow}$ Algebra de Lie $\mathfrak{\Large g}$
$$
Sl_2=GL(\mathbb R)=\Bigg\{M= \begin{pmatrix}
a & b\\
c & d\\
\end{pmatrix}\Bigg/ ad-bc=1 \Bigg\}\qquad\quad[AL1]
$$
Esta conformación de grupo $Sl_2 \in GL(\mathbb R^2,\text{·})$, con matrices cuyas determinantes son igual a uno, es posible asociarle un Algebra de Lie $\mathfrak g$, mediante una aproximación geométrica. Aún más, la determinante de una matriz cuadrada es un polinomio de sus entradas, por lo que es infinitamente diferenciable.142
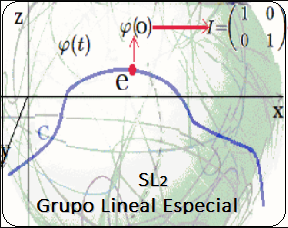
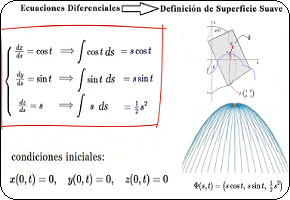
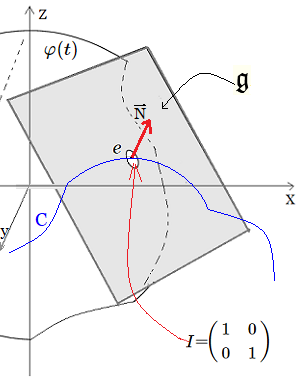
En efecto, si parametrizamos los elementos en $a(t),b(t),c(t),d(t)$ de la matriz $[AL1]$, i.e. con una función diferenciable $\varphi(t) \in Sl_2(\mathbb R)$, entonces se puede asumir que existe una curva $C$ que se desplaza sobre la superficie lisa del objeto.
Luego, bosquejamos en la figura#1 una curva $C$ continua y diferenciable que se desliza sobre esa (manifold) superficie suave tridimensional:
Fig#1 $\large{\varphi(t)}$: Curva $C$ sobre Variedad Suave
Entonces, $[AL1]$, en términos paramétricos se tiene la matriz:
$$\varphi(t)=\begin{pmatrix}
a(t) & b(t)\\c(t) & d(t)\\
\end{pmatrix}\qquad\quad[AL2]$$
Es decir, se asume que esta función $\varphi(t)$ del grupo $Sl_2$, determina una curva sobre la variedad en el plano 3-dimensional euclidiano, de modo que tiene un punto neutro igual a la idéntica. (Ver figura #2)135
Luego, al evaluar la derivada $\varphi(t)$ de la función en el punto identidad $I$, se genera un plano tangente a la variedad en ese punto, y consecuentemente un Algebra de Lie asociada.
Ilustremos su demostración:
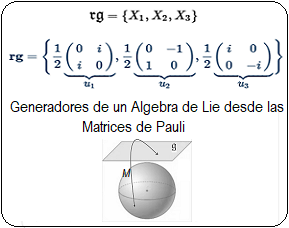
Sea $X=\begin{pmatrix}
x & y\\z & w\\
\end{pmatrix}
$, el conjunto de matrices de $2\times 2$ que genera un álgebra de Lie $\mathfrak g$.
Aplicamos al conjunto $\unicode{123}g_1,g_2,g_3\unicode{125}$ la operación binaria Corchetes de Lie, $[XY]=XY-YX$, para probar que cumple las propiedades89 requeridas para constituir un Algebra de Lie.
Veremos una síntesis de los resultados en la siguiente tabla:
Luego, desde una perspectiva de la geometría euclídea este grupo especial $Sl_2$ se conecta con un Algebra de Lie $\mathfrak g$ mediante una representación que llamamos $\mathfrak{rg}$ del espacio tangente al punto Identidad, utilizando la operación binaria, - previamente definida -, Corchetes de Lie, i.e. se satisfacen las propiedades de ser bilineal, antisimétrica y cumplir con identidad de Jacobi.
El grupo lineal especial $Sl\subset G(n)$, se puede generalizar a un Algebra de Lie $\mathfrak{g}$, formada por todas las matrices de $n\times n$, sobre el cuerpo de los reales o complejos y cuya traza es nula.
Fin de los Apuntes
Fin de estos apuntes considerados representativos para describir el cálculo y evolución de la determinante de una matriz.
Mostrando especialmente el paso entre el grupo lineal especial $Sl_2(\mathbb R)$ y su correspondiente Algebra de Lie $\mathfrak {g}$.
De ahí hacia atrás toda el álgebra para la resolución de sistemas de ecuaciones lineales de orden $n$.
Basado en la Teoría de la Determinantes de n-ésimo orden, son su álgebra acerca utilizando permutaciones y sustituciones (Ver "Curso de Algebra Superior" de A.G. Kurosh, Editorial Moscu (URSS) 1968).
Así mismo, de ahí hacia adelante con un mundo matemático infinito.