Algebra de Lie,
Espacio Vectorial de las Matrices de Orden n×n,
Definición Algebra de Lie,
Corchetes de Lie ~ Levi-Civita,
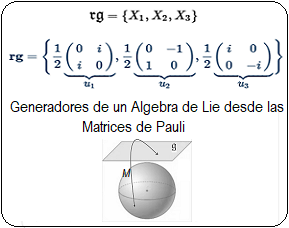
Generadores Infinitesimales,
Matrices Rotación SO(2) y SO(n),
SO(3) Conexión Exponencial,
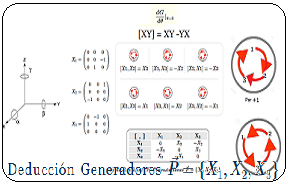
Deducción Generadores Infinitesimales,
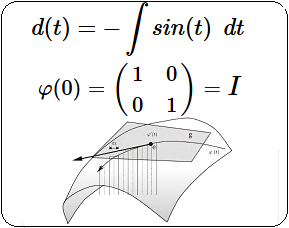
Mapeo Exponencial,
Permutaciones,
Cubo de Rubik
Síntesis
Español
Inglés
Capítulo extraído del artículo Puertas Cuánticas de Pauli ~ Base de un Algebra de Lie, donde se precisa la definición del Algebra de Lie de dimensión finita mediante una introducción a partir de la operación binaria Corchetes de Lie (conmutador de dos matrices)81. Se señala que desde el espacio vectorial de los generadores infinitesimales de un grupo matricial de Lie se conforma un Algebra de Lie en SO(n).
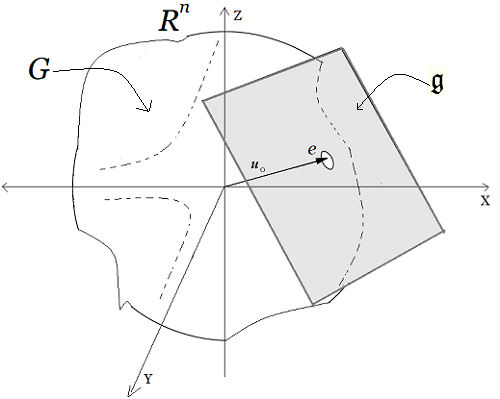
Observaremos que el grupo de Lie $SO(3)$ de rotaciones en $R^3$ y el álgebra de Lie asociado $so(3) \text{ o } \large{\mathfrak {g}}$ de matrices antisimétricas de $3 \times 3$ y veremos cómo se relacionan.
Particularmente aquí, se va a enunciar la definición de Algebra de Lie, sus notaciones fundamentales y exponer brevemente sus conceptos primarios, utilizando las rotaciones desde los $SO(2)$ y $SO(3)$. Así mismo, se ilustrará simplificación de Levi-Civita para tratar el álgebra de matrices infinitesimales generadoras y sus permutaciones asociadas.
1
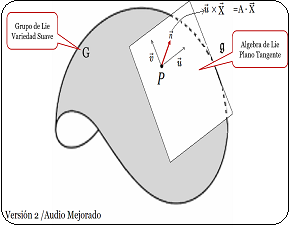
Un grupo de Lie es un grupo que también es una variedad suave y diferenciable.
2
Todo grupo de Lie tiene un espacio tangente asociado llamado álgebra de Lie.
3 El álgebra de Lie se puede estudiar directamente desde los espacios vectoriales, y posteriormente desde sus grupos de Lie asociados.
4 Estos grupos especiales y ortogonales de rotación $SO(n)$, han sido abordados en esta serie de publicaciones para trabajar el concepto e introducción a las Teoría de la Algebras de Lie.
5 $SO(n)$ constituye un grupo con la operación de multiplicación de matrices. Es cerrado, tiene un elemento de identidad I, cada elemento de rotación $R$ en $SO(n)$ tiene una inversa (dado que $det(R)\neq 0$), y la multiplicación matricial es asociativa.
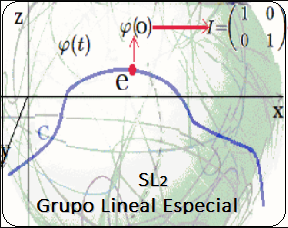
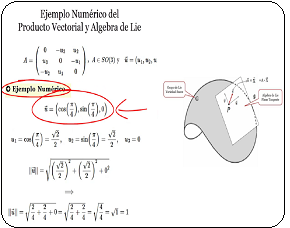
6 Los grupos en $SO(n)$ están vinculados a un conjunto de $n(n-1)/2$ matrices anti-simétricas que forman el álgebra de Lie asociada, normalmente denotada por $\large{\mathfrak{so}(n) \equiv \mathfrak{g}}$. (Ver Particular Ejemplo $Sl_2(\mathbb R,·)$
7 Como todas las álgebras de Lie $\mathfrak{so}(n)$ correspondientes a los grupos de Lie $SO(n)$, se caracteriza por la operación binaria corchetes de Lie, la cual adquiere forma de relaciones de conmutación entre las matrices antisimétricas.
8 Las rotaciones en teoría de Lie se basan en una simple consideración de simetría e invariabilidad de la métrica.
9 Las rotaciones dejan invariantes los productos escalares de los vectores. Dejando sin cambio las magnitudes de los vectores.
10 El enfoque de la Teoría de Lie se puede generalizar a dimensiones superiores desde el enfoque trigonométrico elemental que utiliza las conocidas matrices de rotación $SO(2)$ y $SO(3)$.
11 Otro enfoque surge del mapeo exponencial que conecta el álgebra de Lie $\mathfrak{so}(n)$ con el grupo de rotación $SO(n)$, en una especie de análogo matricial de la fórmula de Euler $e^{ix} = \mathrm{cos}(x) + i·\mathrm{sin}(x)$.
12 Las rotaciones en el espacio euclidiano de $n$ dimensiones se implementan multiplicando vectores por una matriz de rotación de $n \times n$ , $R (\vec{\theta})$ que es una función continua, donde $R(\vec{0}) = I$.
13 Se considera que estas rotaciones son infinitesimales, i.e. $\require{cancel} \frac{\theta}{\cancelto{\infty}{n}}\longrightarrow 0$, en el sentido se aproximan a la identidad en ángulos infinitesimalmente pequeños. Aproximación Infinitesimal de las Rotaciones Pasivas).
14 Si $\vec{z}$ es el vector de las diferenciales de coordenadas, entonces la rotación encarnada en $R(\vec{\theta})$ se implementa desde la aproximación $R(\epsilon)≈(I+A)$
(Ver Aproximación Fundamental)
15 La matriz $R$ es ortogonal. La determinante de un producto es el producto de las determinantes, y la determinante de una transposición es la misma que la determinante original: $\mathrm{det}(R^T R) = \mathrm{det}(R^2) = \mathrm{det}(I) = 1$
+ Introducción
Introducción x
Vamos a tratar las rotaciones del algebra lineal sobre el cuerpo de los reales, particularmente los grupos de rotación $SO(3)$ y Algebra de Lie $\mathfrak {so(3)} =\large{\mathfrak {g}}$ asociada.
Recordemos que $SO(3)$ es el conjunto de todas las rotaciones continuas de $3\times 3$ especiales y ortogonales cuya determinante es uno.
$$SO(3)=\unicode{123} M \in \mathbb{R^3} \text{/} det(M)=1 \land \underbrace{M^{T}M=M^{T}M=I}_{\text{Ortogonalidad}} \unicode{125}$$
El pequeño $\mathfrak {so(3)}$ que se denotará también como $\large{\mathfrak {g}}$ es el conjunto de todas las matrices reales tridimensionales antisimétricas, que llamaremos Algebra de Lie del grupo $\mathbf SO(3)$.
Donde una matriz cuadrada es antisimétrica cuando su traspuesta es igual ella misma pero negativa, entonces se define como:
Nótese que un Grupo de Lie no es lo mismo que Algebra de Lie.
El algebra de Lie $\large{\mathfrak {g}}$ se define como el conjunto de matrices que forman un espacio vectorial119 con el conmutador (Corchetes de Lie) de dos matrices $[XY]=XY-YX$.
La definición de la operación binaria Corchete de Lie trabaja sobre un espacio vectorial de matrices, donde la multiplicación entre matrices no es conmutativa. En este caso, se ilustrará con matrices en $SO(2) \text{ y } SO(3)$.
Veremos que $\large{\mathfrak {g}}$ es cerrado bajo la operación denotada como $[.,.]$.
Por lo tanto, el conmutador $[XY]^T=-[XY]$ de las dos matrices $X,Y \in \large{\mathfrak {g}}$ es también antisimétrico.
La relación entre los grupos $SO(3)$ y su algebra de Lie $\large{\mathfrak {g}}$ se puede generar mediante el enfoque exponencial,
Si $X \in \large{\mathfrak {g}}$ entonces $\large{e^{X}} \in SO(3)$, i.e. $\large{e^{X}}$ es una matriz de rotación en $\mathbb {R^3}$. (Conexión Grupo de Lie con Mapeo Exponencial)
Desde ahí entonces, abordaremos la rotación en un espacio tridimensional, i.e. partiendo desde $SO(2)$ hacia $SO(3)$.
$$\mathbf {SO(2)\mapsto SO(3)}$$
Esta transformación la realizamos mediante una matriz aumentada $M_{3×3}$ que multiplicada por el vector $X$ obtiene nuevas coordenadas en $X'$, i.e. generando un sistema de coordenadas sobre la variedad SO(3).
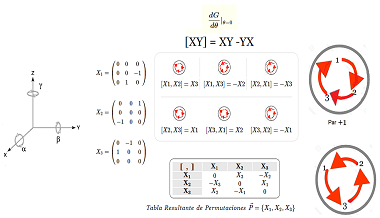
De modo que rotando infinitesimalmente el objeto en el plano $xy$ en torno al eje $z$, se obtienen los tres generadores matriciales $\vec P=\unicode{123}X_1,X_2,X_3\unicode{125}$ del Algebra de Lie $\mathfrak {so(3)}=\large{\mathfrak {g}}$ asociada.
Con los generadores de $SO(3)$ se ilustran las rotaciones cíclicas y anticíclicas y se describe el símbolo de Levi-Civita representando las permutaciones tridimensionales del Algebra de Lie, desde SO(3).
+ Videos Asociados
x
Videos Publicados Asociados a los Grupos y Algebras de Lie
Un Algebra de Lie $Mn(K)$ se define en un espacio vectorial sobre un campo $K$119.
Específicamente es un espacio vectorial de matrices de orden $n×n$, dotado con una operación binaria propia $[\text{ }· \text{, · }]$ denominada Corchetes de Lie, donde dicha operación debe cumplir las siguientes propiedades90:
i) Bilineal
$[\alpha X +\beta Y,Z]=\alpha[X,Z]+\beta[Y,Z]$ $\land$ $[Z,+\alpha X+\beta Y]=\alpha[Z,X]+\beta[Z,Y]$ , donde $\alpha, \beta \in K$
Esta propiedad bilineal establece que el corchete de Lie es lineal en cada una de sus variables por separado, mientras que la otra variable se mantiene fija. Formalmente, dadas dos matrices $ X, Y, Z $ y un escalar $ \alpha $, la propiedad bilineal del corchete de Lie se puede expresar también como sigue:
$ [X + Y, Z] = [X, Z] + [Y, Z] \text{ (Aditividad en la primera variable)}$.
$ [\alpha X, Y] = \alpha [X, Y] \text{ (Homogeneidad en la primera variable)}$.
ii) Antisimétrica
$([X, Y] = -[Y, X]) (\Rightarrow [X,X]=0)$
La propiedad antisimétrica significa que intercambia el orden de las matrices en el corchete, a fin de producir el negativo del corchete original. Es esencial para definir los álgebras de Lie semisimples y compuestas. Además, juega un papel crucial en la teoría de representaciones de álgebras de Lie.
iii) Satisfacer la Identidad de Jacobi:
$([X, [Y, Z]] + [X, [Z, X]] + [Z, [X, Y]] = 0)$.
La Identidad de Jacobi, es una ecuación que establece la aplicación sucesiva del corchete de Lie entre las tres matrices $ X $, $ Y $ y $ Z $ satisface una relación de cancelación específica, i.e. refleja la estructura algebraica subyacente del álgebra de Lie y es una propiedad fundamental que distingue a estas álgebras.
proporcionando una caracterización crucial de estas estructuras algebraicas.
Luego, $Mn(K)$ es un álgebra asociativa no conmutativa con elemento unidad 122.
Hay ocho álgebras de Lie distintas que se definen sobre el espacio tridimensional $\mathbb {R^3}$, que se caracterizan por sus relaciones de conmutación, (corchetes de Lie), acerca del Algebra de Lie. Nótese que en esta serie de artículos y videos, sólo se consideran dos importantes. Por un lado, aquellas álgebras de Lie asociadas al grupo especial ortogonal tridimensional $SO(3)$ y por otro lado, aquellas álgebras de Lie asociadas al grupo especial lineal bidimensional $SL(2,\mathbb R)$.
En el presente caso, se trabaja con matrices ortogonales sobre el espacio n-dimensional, donde el cuerpo $K$ en este documento siempre lo consideramos como los Reales o Complejos.
En este artículo, se abordará el Algebra de Lie sobre el cuerpo de los números reales y $Mn(\mathbb R)$ denotará la variedad diferenciable formada por las matrices reales de orden $n$, con una estructura diferenciable dada por su biyección natural con $\mathbb R^{n \times n}$
+ Nota: Definición como Variedad Diferenciable
El conmutador $[XY]=XY - YX$ se considera como una medida. Nótese que actúan las operaciones ordinarias del álgebra de matrices donde la multiplicación matricial no es conmutativa.
Efectivamente, el espacio vectorial de los generadores infinitesimales de un grupo80 matricial de Lie conforma un Algebra de Lie en $SO(n)$82.(La propiedad de antisimetría es equivalente a: $[X,X]=XX-XX=0 = 0, \forall X\in g$).
Transformación desde $SO(n)$ hacia un Algebra de Lie
La operación es una transformación lineal de la forma:
$$[X,Y]: G × G\longrightarrow G \text{, donde } \forall X,Y,Z \in G$$
En otras palabras, el producto vectorial, - no sólo de vectores sino también matrices-, también está dentro de $G$. Por esa razón se le denomina el Algebra de Lie asociada al grupo $G$. 128
Donde $G$ es un grupo de $SO(n)$. Es decir, la operación binaria Corchete de Lie, transforma un par ordenado de matrices desde el producto vectorial $G × G$ hacia una Algebra de Lie (Nuestra notación será $g \lor Mn(K)$, ambos indistintamente).
En otras palabras, $G$ es un grupo especial ortogonal de dimensión $n$109:
$$G=\unicode{123} M \in SO(n) \text{/} det(M)=1 \land M^{T}M=M^{T}M=I\unicode{125}$$
Conexión Grupo de Lie con Mapeo Exponencial
Una conexión elemental de los Grupos de Lie con las Algebras de Lie, se realiza entonces mediante el mapeo exponencial:
$$Exp: SO(n)\longrightarrow \mathit{so(n)}$$
Efectivamente, cuando se trabaja sobre los números complejos con la matriz $X \in SO(n)$ como exponente de la constante $\large{e}$, se facilitan una gran cantidad de propiedades lineales. Nótese que $X^0=I$, la serie de potencias siempre converge estando la exponencial de $X=X_{1 \times 1}$ bien definida.
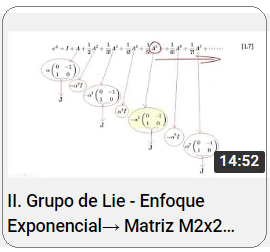
Obsérvese que este mapeo exponencial nos indica básicas propiedades para transformar la suma hacia la descomposición en factores de un producto. Es decir, propiedades que nos ayudarán a comprender las rotaciones infinitesimales de la forma:
En efecto, se demuestra desde la serie de Taylor de $\large{e}^X$, junto a la propiedad antisimétrica de los corchetes de Lie $([XY]=-[YX])$ conforman una relación simple mediante el mapeo exponencial. (Serie que es convergente para matrices $M_{n \times n} \in SO(n)$, tanto en $\Bbb R$ como $ \Bbb C$):
$$exp: G × G\longrightarrow G \text{, sobre } \Bbb C$$
$$exp(X)=\large{e}^X= \sum_{k=0}^{\infty} \frac{1}{k!}X^k= I+ X + \frac{1}{2}X^2 + \frac{1}{3!}X^3+\frac{1}{4!}X^4 + \frac{1}{5!}X^5 + \frac{1}{6!}X^6+\frac{1}{7!}X^7+ \cdots\cdots$$
Utilizando las conocidas propiedades de las potencias de igual base:
$$ \rhd \text{ } [XY]=0 \Rightarrow \large{e}^{X+Y}=\large{e}^X\large{e}^Y$$
Y la conocida propiedad de una potencia con exponente negativo:
Luego, cuando las matrices $X,Y \in G$ conmutan, entonces se pueden aplicar todas las operaciones algebraicas que se utilizan con los números complejos.
Generador $SO(2)$
El generador de $SO(2)$ es la matriz antisimétrica93:
Luego, el conjunto especial de matrices ortogonales de $2 \times 2, SO(2)$, - i.e. en dos dimensiones.
Si se define la operación Corchete de Lie como idénticamente cero (i.e. la rotación que da donde mismo), entonces todo espacio vectorial se convierte en un álgebra de Lie Abeliana trivial i.e. Conmutan completamente). Si no es $0$, significa que las rotaciones conmutan, como se ilustra en la siguiente figura:
Rotación impar($-1$) y par($+1$) Dimensión 2
Rotación Par($+1$) Dimensión 2
Una propiedad importante de la definición de la operación es la antisimetría:
$[XY]=XY-YX=-[YX]$,
donde $X,Y \in SO(2) \land X \ne Y$
Recordar que esta definición de la operación Corchete de Lie trabaja sobre un espacio vectorial de matrices, donde la multiplicación entre matrices no es conmutativa. En este caso, se ilustra con matrices en $SO(2) \text{ y } $SO(3)$ $.
La finalidad de iniciar con los grupos de Lie $SO(2)$ y $SO(3)$, es que son objetos geométricos visualizables en el plano euclidiano, que nos llevan al marco general de los siguientes pasos abstractos que se aplican con el Algebra de Lie.120
La rotación de objetos en un espacio tridimensional se realiza desde $SO(2)$, puesto que, - por ejemplo en la figura -, se está rotando el objeto en torno al eje $z$ en la planta, el cual apunta hacia arriba, i.e. se está rotando un objeto sólo en dos dimensiones en el plano $xy$. Lo mismo con las otras rotaciones independientes localizadas en la parte superior del robot que se van encadenando.
$SO(2)$ Brazo Robótico en $R^3$.Múltiples Rotaciones
Corchetes de Lie ~ Levi-Civita
Utilizando el símbolo Levi-Civita107 en dos dimensiones, donde $+1$(par) representa la rotación en el sentido de los punteros del reloj y $-1$(impar) contrario al sentido de los punteros del reloj:
$$
\epsilon _{ij} =
\begin{cases}
+1, & \text{si (ij) es (1,2)} \\\\
-1, & \text{si (ij) es (2,1)}
\end{cases}
$$
Generadores $SO(3)$
La rotación de matrices $M$ (frecuentemente denotada también como $R_{\theta}$) constituye una representación de los $SO(3)$ ('Special Orthogonal Group of Dimension $3$').
Luego, las matrices $\vec P=\unicode{123}X_1,X_2,X_3\unicode{125}$, unido a la matriz identica $I=\mathbf {1}$, que describiremos a continuación son también denominadas Generadores Infinitesimales de $SO(3)$, dado que toda rotación de un ángulo infinitesimal $d\theta$ puede ser expresado como:
Estos generadores forman una base vectorial para la representación matricial del Algebra de Lie SO(3), en este caso el conjunto de todas las matrices antisimétricas de $3 \times 3$ .Incluyendo la matriz identidad $I$.
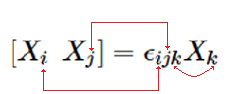
En síntesis, se mostrará que aplicar a los generadores infinitesimales $\vec P=\unicode{123}X_1,X_2, X_3\unicode{125}$ el símbolo de Levi-Civita, implica que:
$[X_1 X_2]=\epsilon _{123}X_3 \text{, } [X_2 X_3]=\epsilon_{231} X_1 \text{, } [X1,X3]=\epsilon_{132} X2 \dots$, etc. como se detallará más adelante.
Nótese que en la ingeniosa combinación de la notación Levi-Civita, la permutación de los dos primeros subíndices ${ij..}$ de $\epsilon$ corresponden a los subíndices de la matrices que están dentro de los corchetes $[X_i X_j]$ y el último $k$ a la matriz resultante. (Sin considerar aún que $\epsilon _{ijk}$ puede tomar los valores $-1,0,1$).
Es decir, $\epsilon _{123}=\epsilon _{231}=\epsilon _{312}=1$ y $\epsilon _{132}=\epsilon _{321}=\epsilon _{213}=-1$
La notación de Levi-Civita es muy útil para la comprensión del cálculo tensorial y facilita considerablemente a los físicos en sus trabajos con operaciones vectoriales, tanto en el ámbito experimental como teórico. En síntesis, esta notación es una poderosa herramienta para derivar complejos vínculos vectoriales.
Permutación Par o Cíclica
Permutación Impar o Anticíclica
Así mismo, se mostrará que las permutaciones $\mathbf {\epsilon _{ijk}}$ cuando son $+1$(par), representan la rotación en el sentido de los punteros del reloj, $-1$ (impar) lo contrario al sentido de los punteros del reloj y $0$ en los otros casos. Dicho de otro modo, hay dos tipos de permutaciones, llamadas pares e impares, según el número de trasposiciones en que se descompongan.
Ahora, en $SO(3)$,- i.e. en tres dimensiones-, los elementos generadores infinitesimales $\vec P=\unicode{123}X_1,X_2,X_3\unicode{125}$
y sus relaciones de conmutación constituyen un Algebra de Lie:
Los grupos en $SO(3)$ consisten en rotaciones en tres dimensiones, que en este caso se configuraron a partir de la matriz $M_{2 \times 2} \in SO(2)$ aumentada con los vectores canónicos.
$$
\begin{pmatrix} x \\ y \\ z \end{pmatrix} \mapsto
x \mathbf{\vec i} +
y \mathbf{\vec j} +
z \mathbf{\vec k}
$$
Ciertamente la matriz real $M_{2\times 2}$, - sobre un ángulo de rotación $\theta$ -, en torno a un origen o centro de rotación en el plano cartesiano, constituye un generador del Grupo de Lie, i.e. un grupo especial ortogonal de dimensión 2:
A partir de esta matriz de base $M_{2 \times 2}(\theta)$, se construyen las tres matrices generadoras en $SO(3)$, que hemos denotado como $G$, que son:
$$G=\unicode{123} M_{x}(\alpha), M_{y}(\beta), M_{z}(\gamma) \unicode{125}$$
Equivalentemente, se utiliza la notación:
$$G=\unicode{123} R_{x}(\alpha), R_{y}(\beta), R_{z}(\gamma) \unicode{125}$$
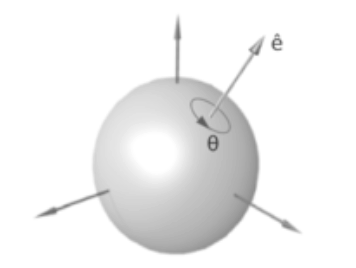
Para la formalización de la rotación de la tres matrices de $G$ en el espacio $\mathbb R^3$, basta sólo con la posición de los vectores unitarios, dado que todo vector es múltiplo de alguno de ellos. Con estos vectores, - y sus operadores matriciales-, se conforma la esfera unitaria.
$$
S^2=\unicode{123}(x,y,z)\in \mathbb R^3 \text{ / } x^2 + y^2 + z^2=1\unicode{125}
$$
Permutando cíclicamente los ejes $\vec x, \vec y, \vec z$, obtenemos las representaciones matriciales correspondientes a rotaciones
respecto a los ejes.
Luego, las matrices de rotación del espacio $\mathbb R^3$ son matrices $3\times 3$, ortogonales y de determinante $1$, i.e. este conjunto tiene estructura de grupo $SO(3)$. En conclusión, el giro es en $SO(2)$ y la acción de rotar la efectúan los elementos del grupo $SO(3)$
Ilustremos la extensión mediante un operador $M_{3 \times 3}(\beta)$ en el plano euclidiano que al ser aplicado a un vector aumentado de coordenadas rectangulares $(x_1,x_2,1)$, - localizado en torno a un punto de origen $0$ -, lo hace rotar en un ángulo $\beta$ hacia un vector $X'$ de coordenadas $(x_1',x_2',1)$.
En otros términos, se aplica el mismo procedimiento previo de SO(2), i.e. una matriz aumentada $M_{3 \times 3}$ que multiplicada por el vector $X$ obtenga estas nuevas coordenadas en $X'$, i.e. de esta forma obtendremos un sistema de coordenadas sobre la variedad SO(3):
Este conjunto de matrices cumple las condiciones de rotación en el plano euclidiano y constituye un Grupo de Lie en $SO(3)$.
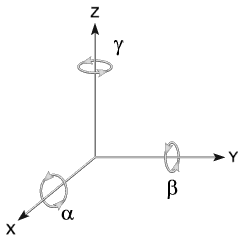
Rotaciones Independientes en Torno a Ejes121
Estas matrices tres matrices de rotación $G=\unicode{123}M_{x}(\alpha), M_{y}(\beta), M_{z}(\gamma)\unicode{125}$, se señalan a continuación en $R$:
$R_{x}(\alpha)$ rota el plano yz alrededor del origen por un ángulo $\alpha$.
$R_{y}(\beta)$ rota el plano xz alrededor del origen por un ángulo $\beta$.
$R_{z}(\gamma)$ rota el plano xy alrededor del origen por un ángulo $\gamma$.
La transpuesta $R^T$ de cada una de estas matrices y multiplicarlas por sus transpuestas respectivas, sus productos serán iguales en a la matriz identidad $I$:
Es decir, el grupo completo $G \in SO(3)$ consiste en el producto de estas matrices, las cuales al multiplicarlas por sus transpuestas son iguales a la matriz identidad $I$. Por tanto, cumplen con la condición de ortogonalidad en lo reales:
Las rotaciones se realizan sobre los ejes de coordenadas Cartesianas en el espacio tridimensional euclidiano, se identifican los ángulos de rotación en torno a cada eje, tomando como referencia el giro en torno al eje $z$ como $\gamma$, el giro en torno al eje $y$ como $\beta$, y el giro en torno al eje $x$ como $\alpha$.
Cada una de las tres matrices $R_x(\alpha), R_y(\beta) \text{ y } R_z(\gamma)$ son una matriz ortogonal, i.e. dejan invariante la longitud del vector en rotación. Esto se realiza porque se requieren,- en cada plano -, sólo rotaciones en torno a dos de los ejes coordenadas rectangulares, prescindiendo del otro eje.
Nótese que la matriz $M_{2 \times 2}\in SO(2)$ se aumenta introduciendo los vectores canónicos: en el caso $M_{x}(\alpha)$, se introdujo $\vec i$ en la primera fila y primera columna; en $M_{y}(\beta)$ se introdujo $\vec j$ en la segunda fila y segunda columna; y en $M_{z}(\gamma)$ se introdujo $\vec k$ en la tercera fila y tercera columna.
Estas tres rotaciones son independientes, las unas de las otras.
Luego, al diferenciar cada una de estas tres matrices y evaluarlas en $\theta=0$, se obtienen los generadores infinitesimales de rotación, en torno a cada uno de los ejes respectivamente $\vec P=\unicode{123}X_{1},X_{2},X_{3}\unicode{125}$ en $SO(3)$.
Es decir, $\vec P=\unicode{123}X_{1},X_{2},X_{3}\unicode{125}$, el cual es un generador unitario del Algebra de Lie en tres dimensiones, se obtiene de las derivadas de cada una de estas tres matrices $M_{x}(\alpha), M_{y}(\beta), M_{z}(\gamma)$.
De esa forma se demuestra cómo se deduce el generador unitario del Algebra de Lie $\large{\mathfrak {g}}$ en tres dimensiones $\vec P=\unicode{123}X_{1},X_{2},X_{3}\unicode{125}$, el cual se mapea como $SO(2)\mapsto SO(3)$, i.e. aumentandando la matriz $M_{2\times 2}$ con los vectores canónicos y obteniendo tres matrices $M_{3\times 3}$ de rotación, en torno a cada eje. Posteriormente, se deriva cada una de las matrices de rotación $G=\unicode{123} M_{x}(\alpha), M_{y}(\beta), M_{z}(\gamma) \unicode{125}$ y se obtiene $\vec P$.
Aquí comprobaremos que:
$$[X1,X2]=X3$$
$$[X1,X3]=-X2$$
$$[X2,X1]=-X3$$
$$[X2,X3]=X1$$
$$[X3,X1]=X2$$
$$[X3,X2]=-X1$$
Si se aplica la operación Corchetes de Lie, por ejemplo $[X1,X2]=X_1·X_2-X_2·X_1$ operando con las matrices dadas, se tiene:
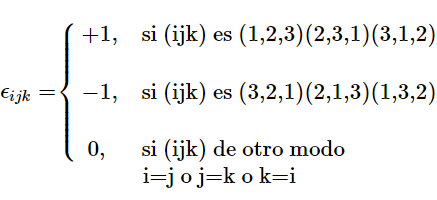
A fin de simplificar las operaciones de permutación, se recurre a la utilización del símbolo Levi-Civita en tres dimensiones:
$$
\epsilon _{ijk}=\begin{cases}+1, & \text{si (ijk) es (1,2,3)(2,3,1)(3,1,2)} \\\\
-1, & \text{si (ijk) es (3,2,1)(2,1,3)(1,3,2)} \\\\
\text{ }0, & \text{si (ijk) de otro modo i=j o j=k o k=i}
\end{cases}
$$
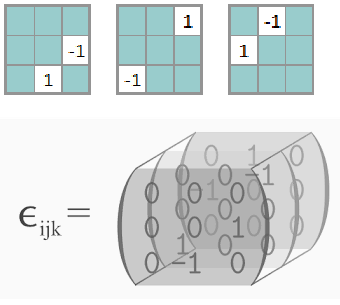
Matriz Dimensión 3 con Símbolo de Levi-Civita125
Es decir, en vez de multiplicar explícitamente las matrices generadoras de $3\times 3$, sintetizamos con los indicadores del símbolo de Levi-Civita, donde $\epsilon=1$ si es una permutación par(+1), $\epsilon=-1$ si es una permutación impar(-1) y $\epsilon=0$ en cualquier otro caso. Ilustremos los casos:
Nótese que de acuerdo con Levi-Civita en tres dimensiones: $\epsilon _{123},\epsilon_{231},\epsilon _{312}, \epsilon _{132},\epsilon _{312},\epsilon _{213} \text{ son }\ne 0$
Luego, la matriz asociada a los valores resultantes de las permutaciones del conjunto de
generadores infinitesimales $\vec P=\unicode{123} X_1, X_2, X_3\unicode{125}$ aplicando el símbolo Levi-Civita $\epsilon_{ijk}$ se señala en la siguente tabla:
[ , ]
$\mathbf {X_1}$
$\mathbf {X_2}$
$\mathbf {X_3}$
$\mathbf {X_1}$
$0$
$X_3$
$-X_2$
$\mathbf {X_2}$
$-X_3$
$0$
$X_1$
$\mathbf {X_3}$
$X_2$
$-X_1$
$0$
Tabla Resultante de Permutaciones $\vec P=\unicode{123} X_1, X_2, X_3\unicode{125}$ 129
Las Permutaciones par son 123, 231, 312
Las Permutaciones impar son 132,312, 213
Por tanto, de esa forma se puede representar todas las permutaciones tridimensionales del Algebra de Lie, desde $SO(3)$.
Una excelente ilustración es el Cubo de Rubik, cuya imagen animada se muestra a continuación, dado que es un ejemplo de un grupo de permutación.
Los grupos de simetría $SO(n)$ son grupos de permutación, donde cada una de las rotaciones, en este caso con alguna de las caras del Cubo de Rubik-, constituye una permutación. Estas rotaciones forman un conjunto generador del Algebra de Lie 121.
Cubo de Rubik Ejemplo de Grupo Simétrico de Permutación